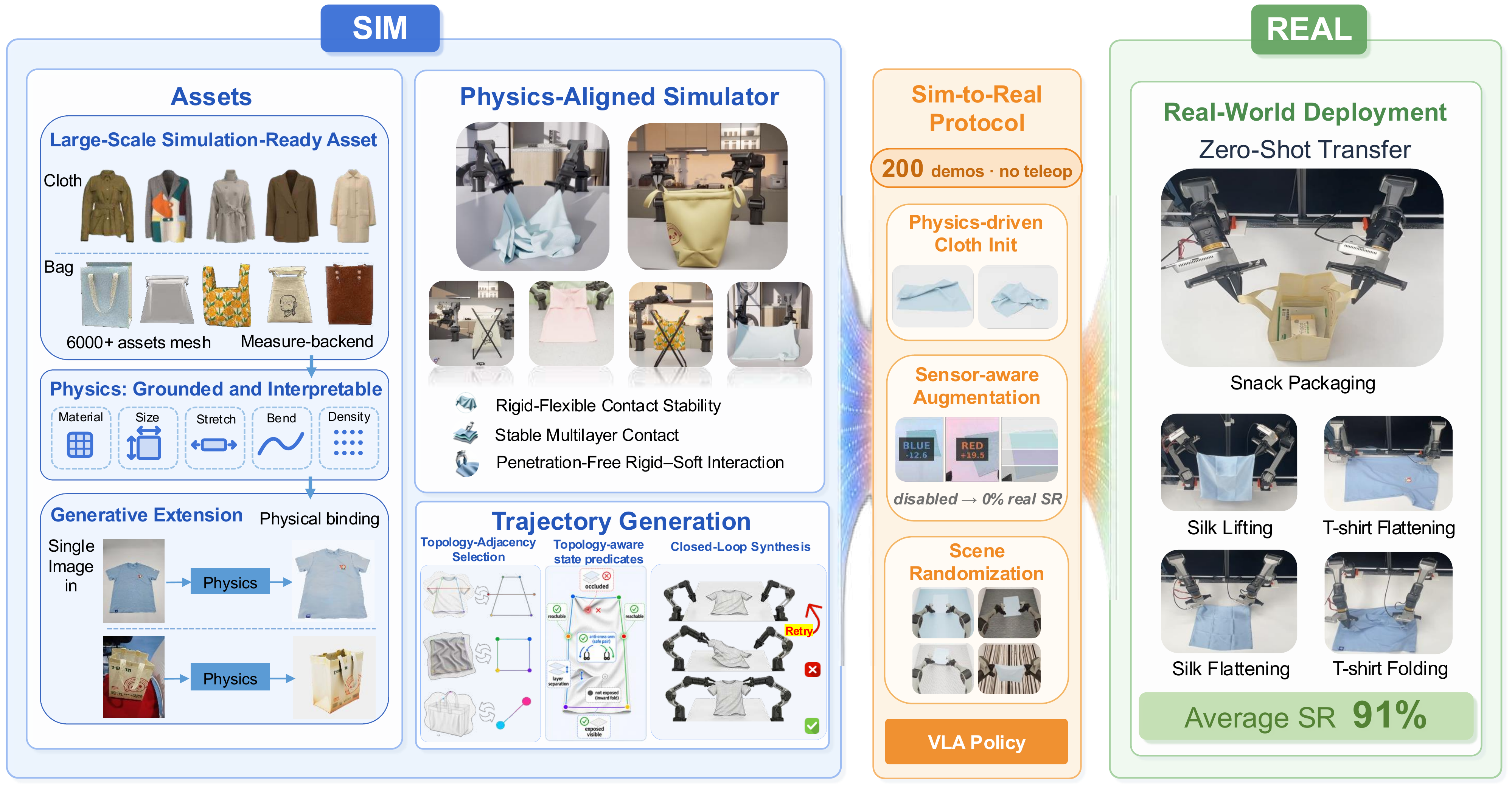
Sim-to-Real Evidence
What the policy saw in simulation — and what it did on the real robot.
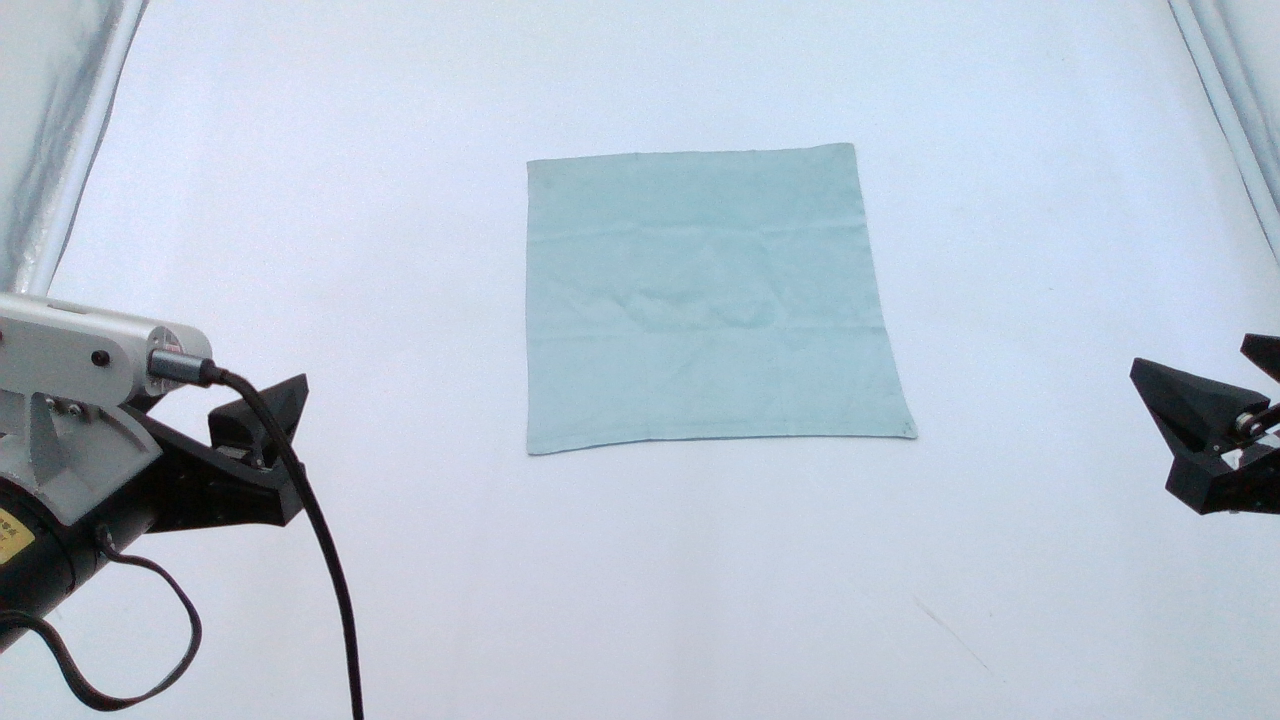
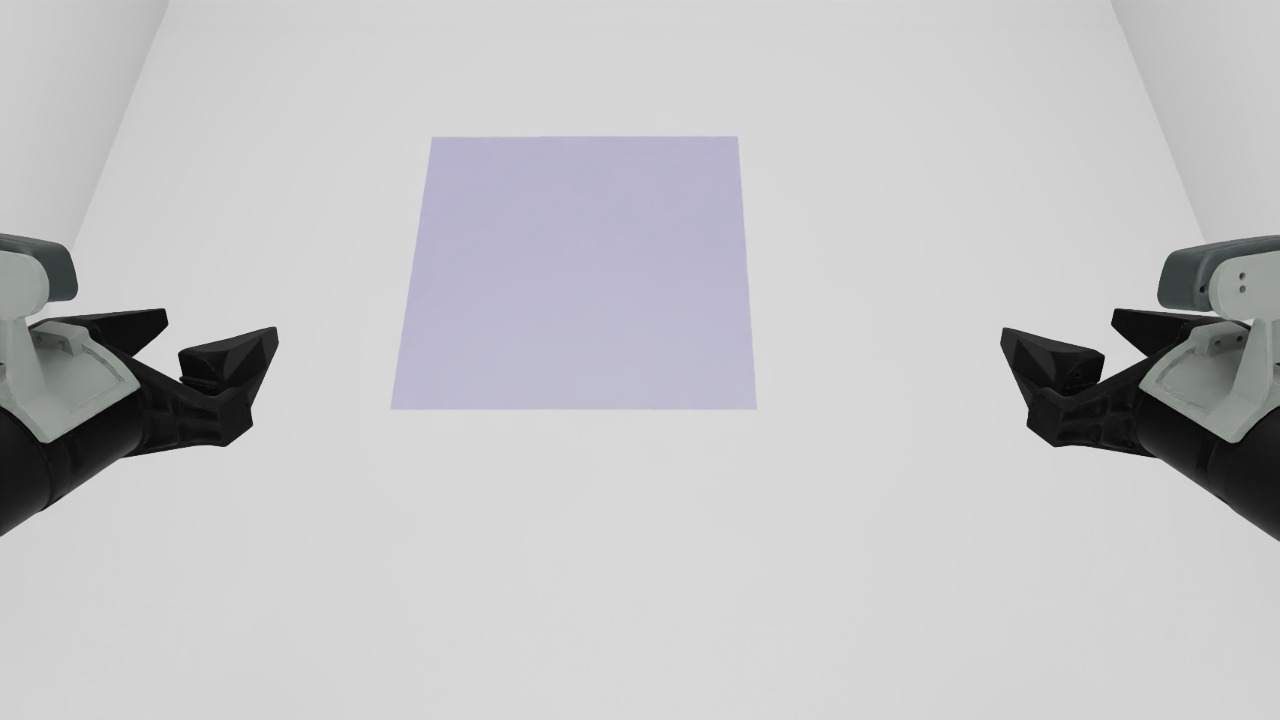
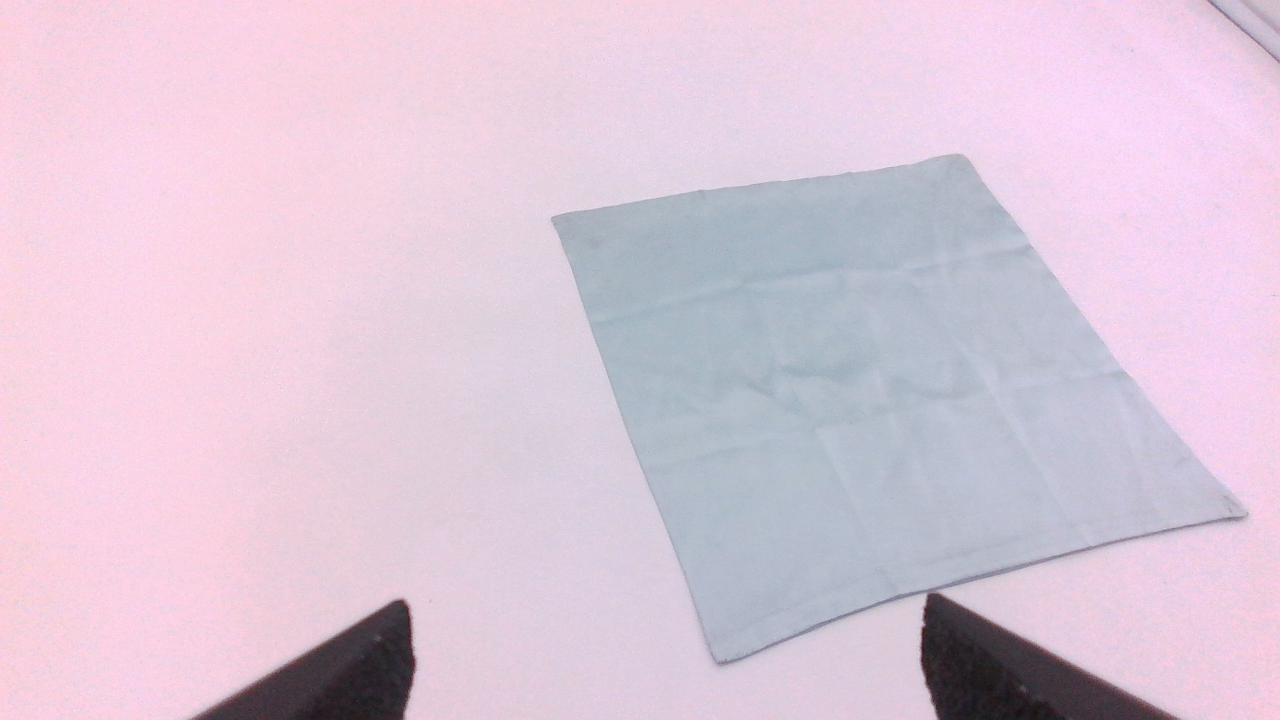
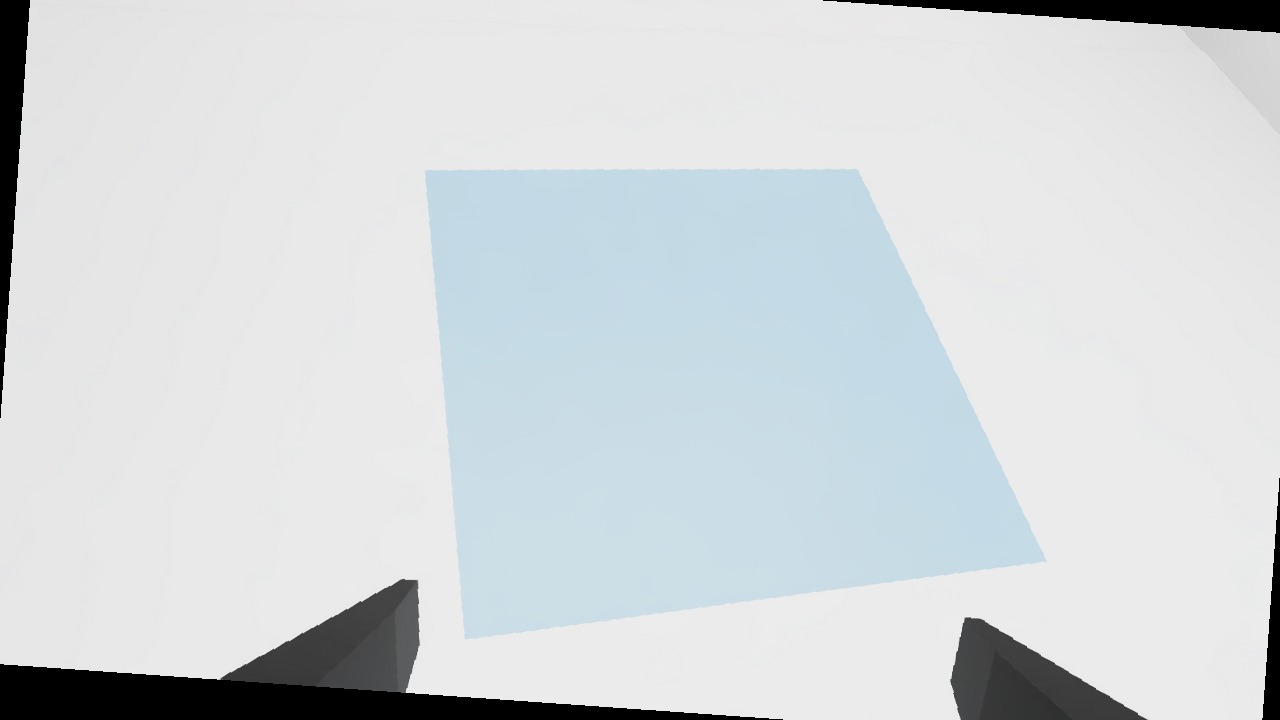
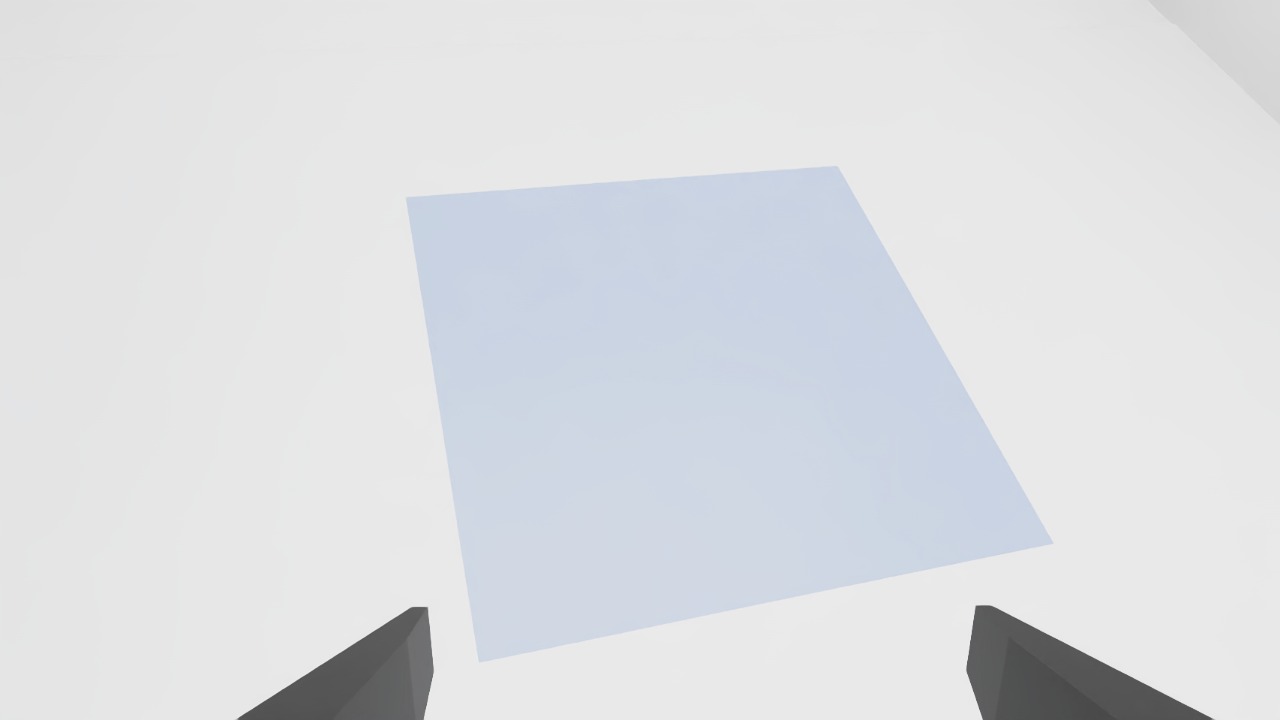
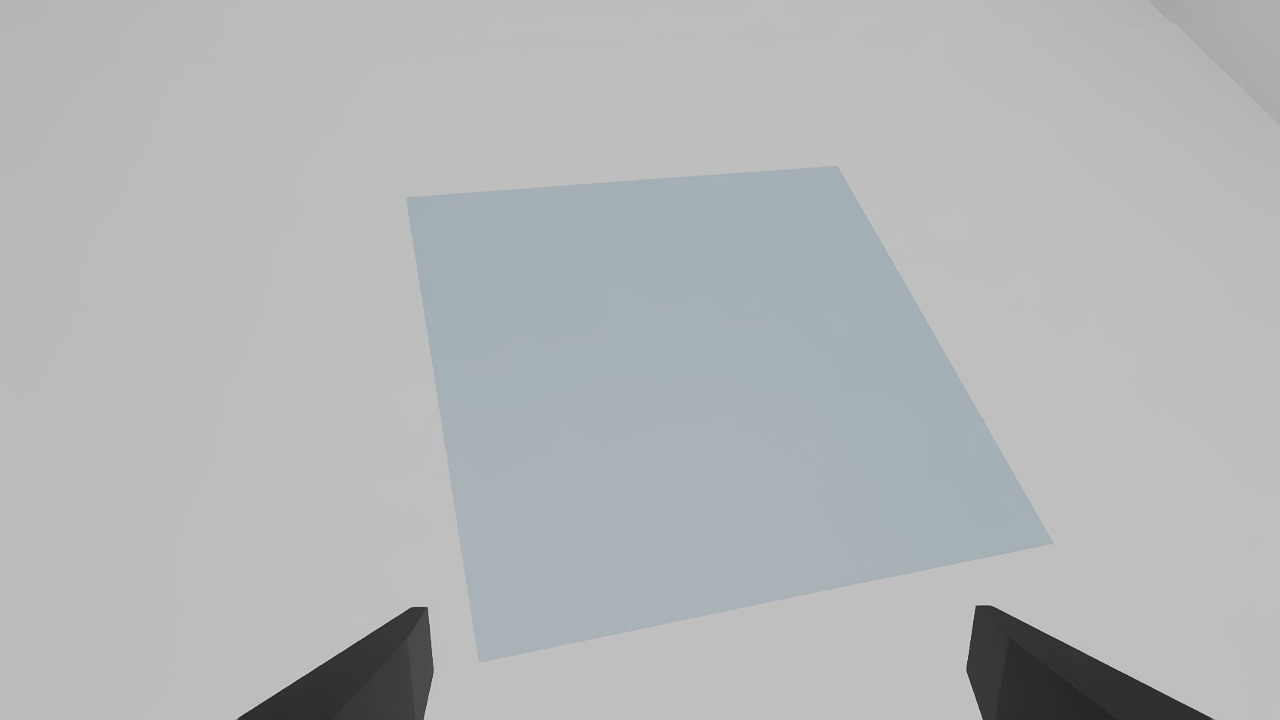
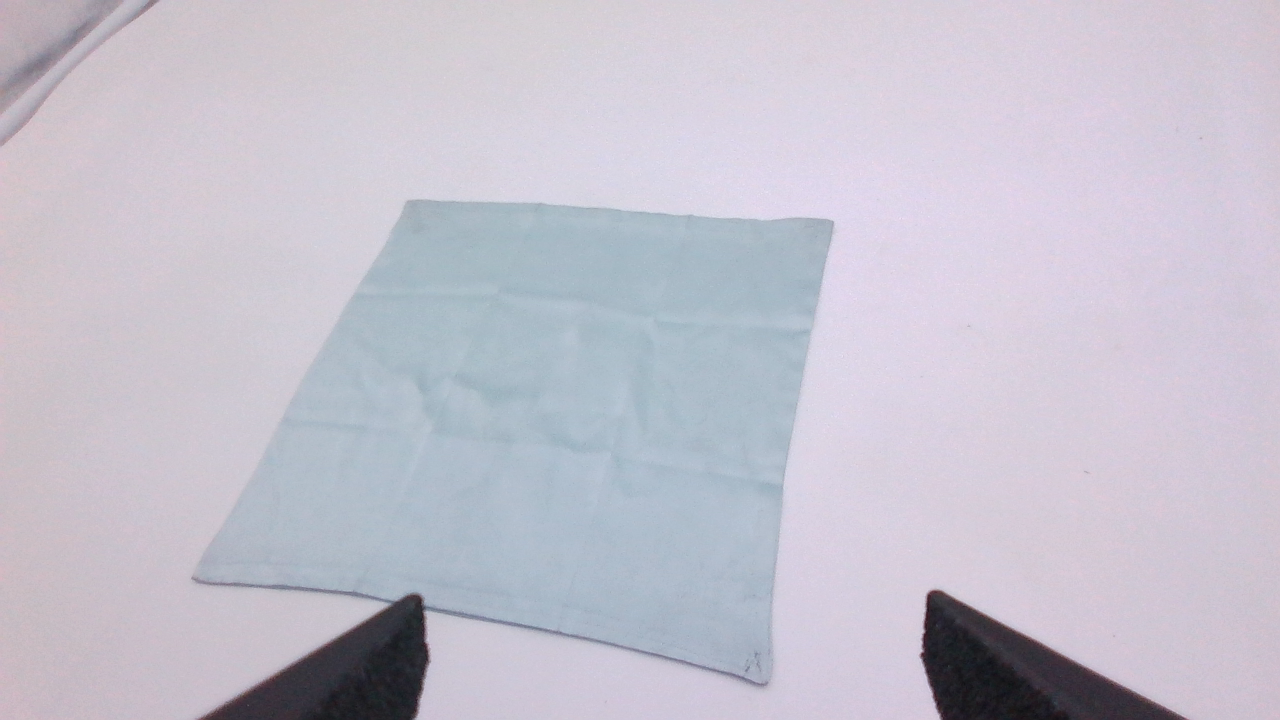
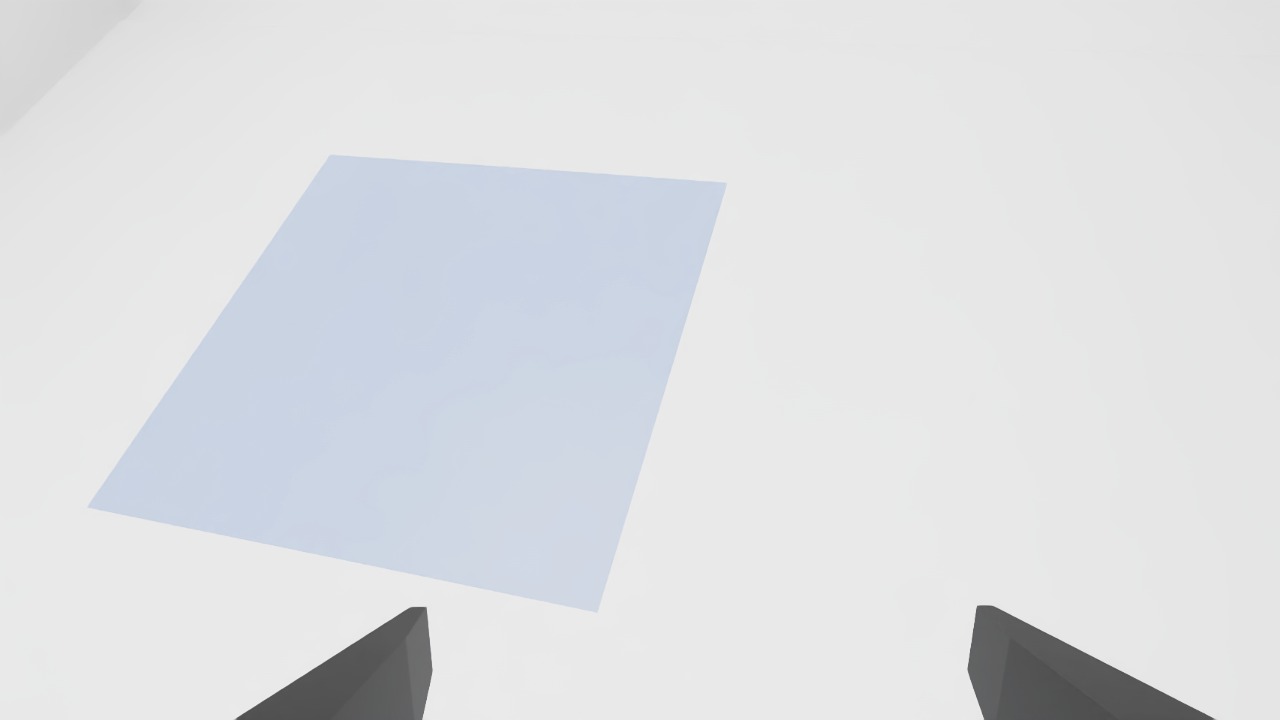
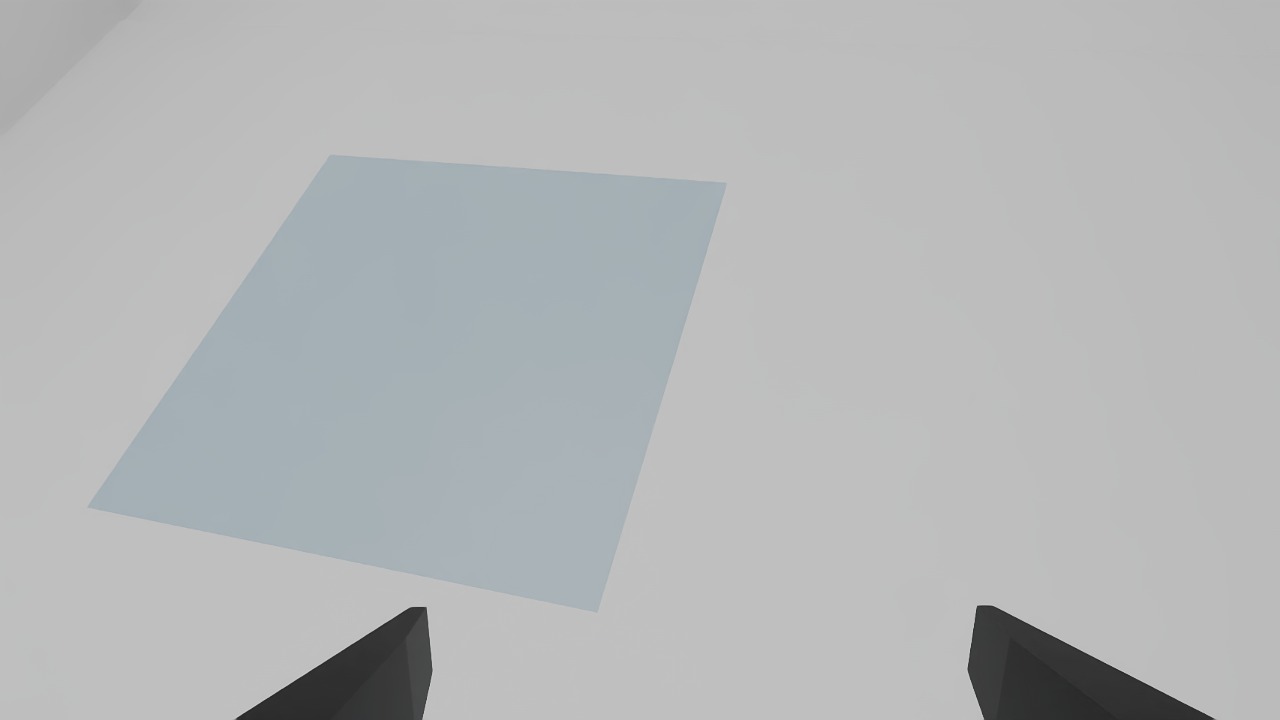
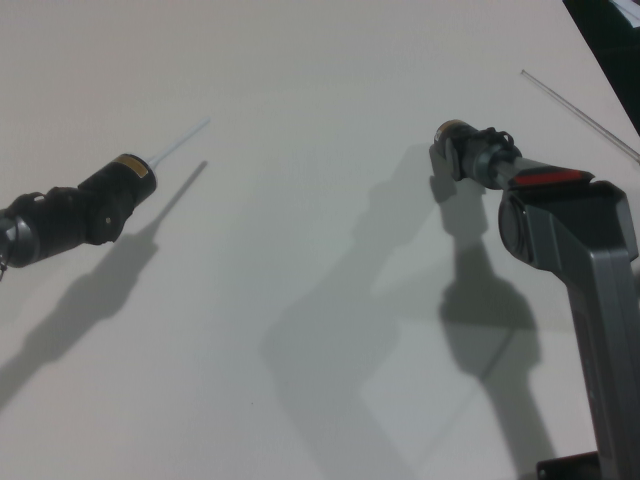
Left: the policy’s actual training observation (front oblique camera). Right: real-world execution with no fine-tuning. Per-task success rates from n=23 consecutive trials.
TASK 01
Silk Grasp
Bimanual grasp of thin reflective silk. Head-to-head vs. real-data baseline.
100.00%
n=23
L wrist
R wrist
SIM · POLICY INPUT
REAL · ZERO-SHOT
TASK 02
Silk Unfolding
Recover flat layout from a draped configuration of reflective fabric.
95.65%
n=23
L wrist
R wrist
SIM · POLICY INPUT
REAL · ZERO-SHOT
TASK 03
Garment Folding
Bimanual T-shirt full-fold with corner alignment.
91.30%
n=23
L wrist
R wrist
SIM · POLICY INPUT
REAL · ZERO-SHOT
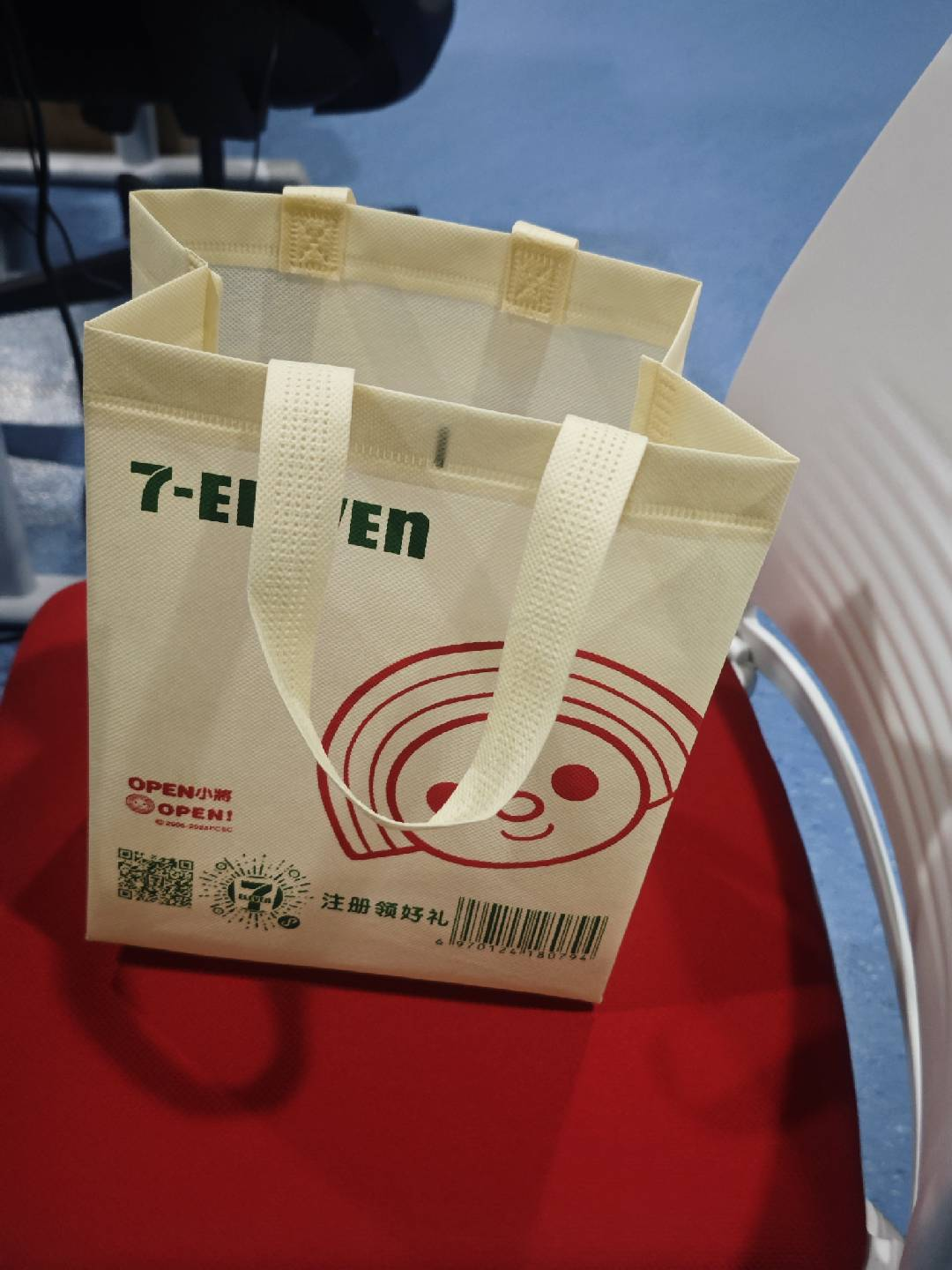
TASK 04
Snack Packaging
Insertion into a thin plastic bag — an open category in prior sim-to-real work.
86.96%
n=23
L wrist
R wrist
SIM · POLICY INPUT
REAL · ZERO-SHOT
TASK 05
Garment Unfolding
Recover flat T-shirt layout from a wrinkled start.
82.61%
n=23
L wrist
R wrist
SIM · POLICY INPUT
REAL · ZERO-SHOT
Qualitative rollout · five tasks
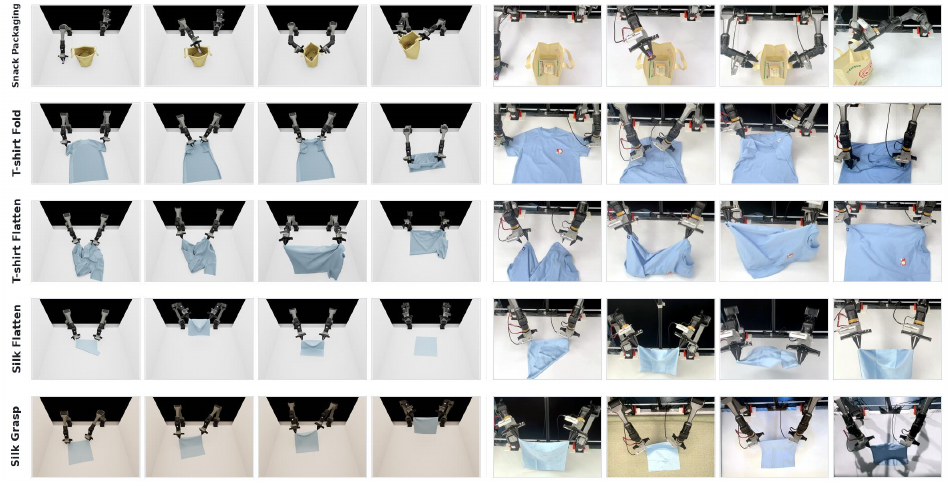
SAME POLICY CHECKPOINT · SIM ROLLOUT KEYFRAMES VS. ZERO-SHOT REAL DEPLOYMENT